本文最后更新于 2 年前,文中所描述的信息可能已发生改变。
dataset
现实图片的数据集可以通过colmap重建出位姿,存储在poses_bounds中
对于模型,blender也可以生成多视角图片
输入的图片
每一张图片都有对应的相机内外参,每一个像素都可以通过矩阵变换得到一个rays,作为训练时input的射线
而每一个像素本身的rgb则可以作为loss
实际的体渲染
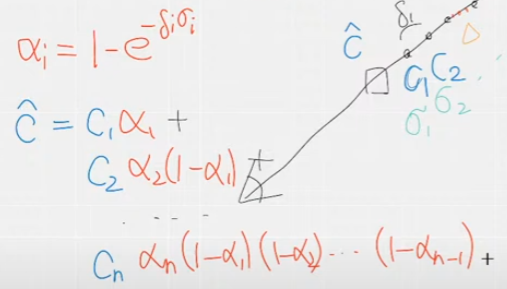
论文中的公式(3)
α为不透明度, 为步长,
为步长, 为密度,很显然步长越长,密度越高,权重应该越高
为密度,很显然步长越长,密度越高,权重应该越高
举例 ,其中
,其中
总之权重和自身的透明度有关,还和遮挡这一点的其他采样点的透明度有关
精细采样的实现
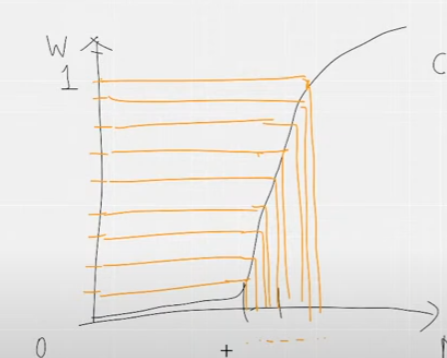
得到一个从n到f的权重累积函数,最大是1,然后在y轴等距离采样,比较陡峭的地方(weight变化大)的地方就会被比较多的采样